HeadPosition Classe
Définition
Important
Certaines informations portent sur la préversion du produit qui est susceptible d’être en grande partie modifiée avant sa publication. Microsoft exclut toute garantie, expresse ou implicite, concernant les informations fournies ici.
Représente un objet qui décrit l’emplacement de la tête d’un utilisateur par rapport au capteur de présence humaine, en termes d’azimut et d’altitude.
public ref class HeadPosition sealed/// [Windows.Foundation.Metadata.ContractVersion(Windows.Foundation.UniversalApiContract, 1245184)]
/// [Windows.Foundation.Metadata.MarshalingBehavior(Windows.Foundation.Metadata.MarshalingType.Agile)]
class HeadPosition final[Windows.Foundation.Metadata.ContractVersion(typeof(Windows.Foundation.UniversalApiContract), 1245184)]
[Windows.Foundation.Metadata.MarshalingBehavior(Windows.Foundation.Metadata.MarshalingType.Agile)]
public sealed class HeadPositionPublic NotInheritable Class HeadPosition- Héritage
- Attributs
Configuration requise pour Windows
| Famille d’appareils |
Windows 11, version 24H2 (introduit dans 10.0.26100.0)
|
| API contract |
Windows.Foundation.UniversalApiContract (introduit dans v19.0)
|
Remarques
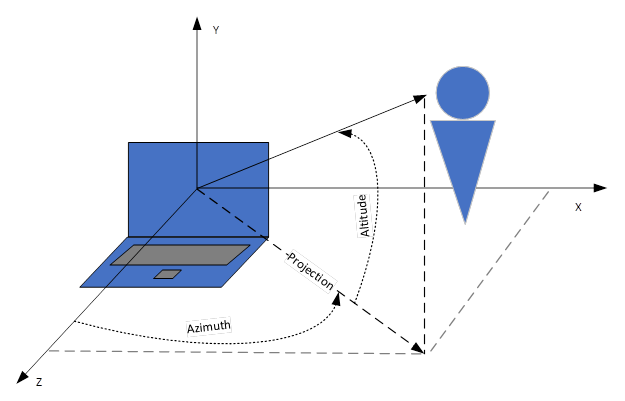
L’axe X se trouve dans le plan de l’écran de l’appareil. Il est positif sur le côté droit de l’écran, du point de vue d’un utilisateur face à l’appareil. (Pour les appareils sans écran, les axes sont définis par rapport au panneau avant de l’appareil.)
L’axe Y se trouve dans le plan de l’écran. Il est positif vers le haut de l’écran.
L’axe Z est perpendiculaire à l’écran. Il est positif envers l’utilisateur face à l’appareil.
Les axes sont fixes par rapport à l’appareil et ne changent pas avec la rotation de l’appareil.
L’image suivante montre comment l’azimut et l’altitude sont décrits par les API de présence humaine.
Propriétés
| AltitudeInDegrees |
Obtient l’élévation de la tête de l’utilisateur par rapport au plan horizontal du capteur de présence humaine, en degrés. |
| AzimuthInDegrees |
Obtient la direction de la tête de l’utilisateur par rapport au plan horizontal du capteur de présence humaine, en degrés. |