Résolution d’entrée (touchpad-input-resolution)
Il s’agit de valider que l’appareil à pavé tactile de précision Windows est en mesure de signaler la résolution spécifiée.
Nom du test
- Test.InputResolution.json
Conditions requises de base testées
- Device.Input.Digitizer.PrecisionTouchpad.InputResolution
Objectif du test
- Vérifie que l’appareil est bien en mesure de signaler à la résolution qu’il spécifie et que la résolution est supérieure ou égale à 300DPI.
Outils (requis)
- PTLogo.exe
Outils (facultatif)
Un capteur capacitif de 7 mm de diamètre.
Plateforme de test de contact robotisée (recommandé : cette tâche peut être difficile si elle est effectuée manuellement). Pour plus d’informations sur le fonctionnement, contactez votre fournisseur d’équipement robotique.
Étapes de validation
Entre deux balayages horizontaux lents, chaque unité logique de X doit être atteinte et signalée. En outre, entre deux balayages verticaux lents, chaque unité logique de Y doit être atteinte et signalée.
Lancez Test.InputResolution.json.
À partir du bord gauche de la surface du numériseur, faites glisser un capteur sur le pavé tactile à une vitesse inversement proportionnelle à la résolution d’entrée signalée de l’appareil pour l’axe X de gauche à droite, puis de droite à gauche. Pour plus d’informations, consultez l’élément à puces suivant sur la Vitesse de glissement. a. Vitesse de glissement : tous les appareils doivent signaler une valeur supérieure ou égale à 125 Hz pour un seul contact. Par conséquent, la formule suivante peut être utilisée pour calculer une vitesse de glissement sécurisée : Vitesse de glissement <= 60 Hz / (plage logique pour l’axe / plage physique pour l’axe).
Par exemple, pour un appareil avec une plage logique de 4 000 pour X et une plage physique de 100 mm pour X, une vitesse de glissement sûre serait :
60 / (4 000/100) = 60 / 40 = 1,5 mm/s.
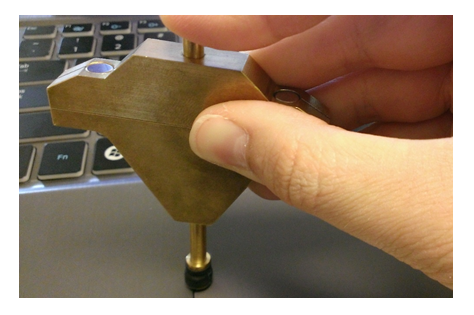
b. Tous les mouvements hors de l’axe ou la gigue sont ignorés lors de ce test. Comme le montre la figure 10, un capteur de précision peut éventuellement être utilisé pour éviter les frictions potentielles se produisant avec un doigt humain, mais il doit être parfaitement perpendiculaire à la surface du pavé tactile afin que la taille du capteur ne soit pas inférieure de beaucoup à 7 mm (l’appareil pourrait alors « perdre » le capteur). 3. Répétez verticalement. En commençant au-dessus du bord supérieur de la surface du numériseur, faites glisser un seul capteur vers le bas du pavé tactile à une vitesse inversement proportionnelle à la résolution d’entrée signalée de l’appareil pour l’axe y, en faisant glisser d’abord du bord supérieur vers le bord inférieur, puis du bord inférieur au bord supérieur. Pour plus d’informations, consultez l’élément à puces précédent sur la Vitesse de glissement.
Note Si suffisamment de coordonnées logiques x/y sont atteintes après un mouvement de balayage sur cet axe, l’itération réussit automatiquement sans qu’il soit nécessaire de balayer dans l’autre sens.
Messages d’erreur courants
- « [20] delta positionnel trop grand : # » o Il y a eu un saut des coordonnées entre 2 rapports ultérieurs qui dépasse la tolérance autorisée de 0,5 mm. o La valeur donnée est la longueur du saut. o Cette erreur arrête une itération, même si un seul balayage a été effectué.
- « [35] coordonnée logique introuvable : # » o La valeur logique minimale ou maximale n’a jamais été signalée lors de l’une ou l’autre des 2 passes pour un axe donné. o La valeur donnée est la valeur logique de X ou Y qui n’a pas été signalée (en fonction de l’axe en cours de validation).
- « [31] Pourcentage trop faible de coordonnées logiques trouvé : # » o Le pourcentage minimal (95 %) de toutes les unités logiques à signaler n’a pas été atteint pour un axe donné. o La valeur indique le pourcentage de toutes les unités logiques qui ont été signalées pour un axe donné.
Critères de réussite
- 2/2 (100 %) des itérations doivent réussir pour que l’état de réussite soit atteint.