KSPROPERTY_CAMERACONTROL_TILT
Les clients en mode utilisateur utilisent la propriété KSPROPERTY_CAMERACONTROL_TILT pour obtenir ou définir le paramètre d’inclinaison d’une caméra. Cette propriété est facultative.
Tableau récapitulatif de l’utilisation
| Obtenir | Définissez | Cible | Type de descripteur de propriété | Type de valeur de propriété |
|---|---|---|---|---|
| Oui | Oui | Filtre ou nœud | KSPROPERTY_CAMERACONTROL_S ou KSPROPERTY_CAMERACONTROL_NODE_S | LONG |
La valeur de propriété (données d’opération) est une valeur LONG qui spécifie le paramètre d’inclinaison d’une caméra. Cette valeur est exprimée en degrés.
Les valeurs positives pointent le plan d’imagerie vers le haut. Les valeurs négatives pointent le plan d’imagerie vers le bas, comme illustré dans l’illustration suivante.
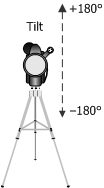
Chaque minidriver de capture vidéo qui prend en charge cette propriété doit définir une plage et une valeur par défaut pour cette propriété. La plage de l’appareil doit être comprise entre -180 et +180. La valeur par défaut doit être 0.
Attention
Lorsque vous écrivez ou testez une application, vous devez savoir qu’en pratique, certains pilotes définissent une plage personnalisée de valeurs d’inclinaison et de valeurs d’étape personnalisées qui peuvent ne pas être basées sur des unités classiques. Les pilotes peuvent implémenter le contrôle d’inclinaison physiquement ou numériquement.
Notes
Le membre Value de la structure KSPROPERTY_CAMERACONTROL_S spécifie le paramètre d’inclinaison.
Pour les caméras utilisant le DMFT de plateforme pour les visages 3A, le contrôle Panoramique a un impact sur la fenêtre de sortie de la caméra. Les coordonnées de visage produites par le DMFT de la plateforme seront relatives à cette fenêtre de sortie modifiée, de sorte que la caméra est chargée de remapper les coordonnées roi sur le champ de vision complet de la caméra lorsque le champ de vue actuel est modifié par le contrôle Panoramique. Selon l’endroit où la modification du champ de vue se produit, le mappage de coordonnées peut avoir besoin d’être bidirectionnel. Par exemple, si la modification du champ de vue est implémentée dans un composant après le DMFT de la plateforme dans la chaîne de pilotes, les coordonnées de retour sur investissement fournies par l’application doivent être mappées au champ de vision complet avant de les envoyer à la caméra et les coordonnées de retour sur investissement calculées dans le DMFT de plateforme doivent être mappées au champ de vue modifié avant d’être envoyées à une application qui les demande.
Spécifications
En-tête : ksmedia.h (include Ksmedia.h)