Transformation du monde
Une transformation mondiale change les coordonnées de l’espace du modèle, où les sommets sont définis par rapport à l’origine locale d’un modèle, à l’espace mondial. Dans l’espace mondial, les sommets sont définis par rapport à une origine commune à tous les objets d’une scène. Le monde transforme un modèle dans le monde.
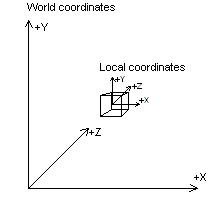
Le diagramme suivant montre la relation entre le système de coordonnées mondial et le système de coordonnées local d’un modèle.
La transformation mondiale peut inclure n’importe quelle combinaison de traductions, rotations et mises à l’échelle.
Configuration d’une matrice mondiale
Comme avec n’importe quelle autre transformation, créez la transformation mondiale en concaténant une série de matrices en une matrice unique qui contient la somme totale de leurs effets. Dans le cas le plus simple, lorsqu’un modèle est à l’origine du monde et que ses axes de coordonnées locaux sont orientés de la même façon que l’espace mondial, la matrice du monde est la matrice d’identité. Plus souvent, la matrice mondiale est une combinaison d’une traduction dans l’espace mondial et éventuellement d’une ou plusieurs rotations pour transformer le modèle en fonction des besoins.
Direct3D utilise les matrices mondiales et d’affichage que vous avez définies pour configurer plusieurs structures de données internes. Chaque fois que vous définissez une nouvelle matrice de monde ou d’affichage, le système recalcule les structures internes associées. La définition de ces matrices fréquemment, par exemple, des milliers de fois par trame est fastidieuse de calcul. Vous pouvez réduire le nombre de calculs requis en concaténant vos matrices de monde et d’affichage dans une matrice d’affichage mondial que vous définissez comme matrice mondiale, puis en définissant la matrice d’affichage sur l’identité. Conservez les copies mises en cache des matrices de monde et d’affichage individuelles afin que vous puissiez modifier, concaténer et réinitialiser la matrice mondiale si nécessaire.
Rubriques connexes