Appendice: Trasformazioni matrice
Questo argomento fornisce una panoramica matematica delle trasformazioni di matrice per la grafica 2D. Tuttavia, non è necessario conoscere la matematica della matrice per usare le trasformazioni in Direct2D. Leggere questo argomento se si è interessati alla matematica; in caso contrario, è possibile ignorare questo argomento.
- Introduzione alle matrici
- Trasformazioni affine
- Rappresentazione di trasformazioni in Direct2D
- Avanti
Introduzione alle matrici
Una matrice è una matrice rettangolare di numeri reali. L'ordine della matrice è il numero di righe e colonne. Ad esempio, se la matrice contiene 3 righe e 2 colonne, l'ordine è 3 × 2. Le matrici vengono in genere visualizzate con gli elementi matrice racchiusi tra parentesi quadre:

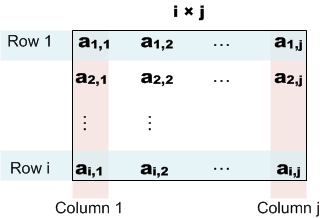
Notazione: una matrice è designata da una lettera maiuscola. Gli elementi sono designati da lettere minuscole. I pedice indicano il numero di riga e colonna di un elemento. Ad esempio, unij è l'elemento nella colonna i'th e j'th della matrice A.
Il diagramma seguente mostra una matrice i × j, con i singoli elementi in ogni cella della matrice.
Operazioni matrice
In questa sezione vengono descritte le operazioni di base definite sulle matrici.
Addizione. La somma A + B di due matrici viene ottenuta aggiungendo gli elementi corrispondenti di A e B:
- A + B = \[ a*ij* \] + \[ b*ij* \] = \[ a*ij* + b*ij* \]
Moltiplicazione scalare. Questa operazione moltiplica una matrice per un numero reale. Dato un numero reale k, il prodotto scalare kA viene ottenuto moltiplicando ogni elemento di A per k.
- kA = k\[ a*ij* \] = \[ k × a*ij* \]
Moltiplicazione della matrice. Date due matrici A e B con ordine (m × n) e (n × p), il prodotto C = A × B è una matrice con ordine (m × p), definito come segue:
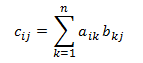
oppure, in modo equivalente:
- c*ij* = a*i*1 x b1*j* + a*i*2 x b2*j* + ... + a*in* + b*nj*
Ovvero, per calcolare ogni elemento cij, eseguire le operazioni seguenti:
- Prendi la i'th riga di A e la colonna j'th di B.
- Moltiplicare ogni coppia di elementi nella riga e nella colonna: la prima voce di riga per la prima voce di colonna, la seconda voce di riga per la seconda voce di colonna e così via.
- Sommare il risultato.
Di seguito è riportato un esempio di moltiplicazione di una matrice (2 × 2) per una matrice (2 × 3).

La moltiplicazione della matrice non è commutativa. Ovvero, A × B ≠ B × A. Inoltre, dalla definizione segue che non tutte le coppie di matrici possono essere moltiplicate. Il numero di colonne nella matrice a sinistra deve essere uguale al numero di righe nella matrice di destra. In caso contrario, l'operatore × non è definito.
Identificare la matrice. Una matrice di identità, designata I, è una matrice quadrata definita come segue:
- I*ij* = 1 se *i* = *j*, o 0 in caso contrario.
In altre parole, una matrice identity contiene 1 per ogni elemento in cui il numero di riga è uguale al numero di colonna e zero per tutti gli altri elementi. Ad esempio, ecco la matrice di identità 3 × 3.

Il blocco di uguaglianza seguente per qualsiasi matrice M.
- M x I = M I x M = M
Trasformazioni affine
Una trasformazione affine è un'operazione matematica che esegue il mapping di uno spazio di coordinate a un altro. In altre parole, esegue il mapping di un set di punti a un altro set di punti. Le trasformazioni affine hanno alcune funzionalità che li rendono utili nella grafica computer.
- Le trasformazioni affine mantengono la collinearità. Se tre o più punti rientrano in una linea, formano comunque una linea dopo la trasformazione. Le linee rette rimangono dritte.
- La composizione di due trasformazioni affine è una trasformazione affine.
Le trasformazioni affine per lo spazio 2D hanno il formato seguente.
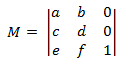
Se si applica la definizione della moltiplicazione della matrice specificata in precedenza, è possibile indicare che il prodotto di due trasformazioni affine è un'altra trasformazione affine. Per trasformare un punto 2D usando una trasformazione affine, il punto viene rappresentato come matrice 1 × 3.
- P = \| x y 1 \|
I primi due elementi contengono le coordinate x e y del punto. Il 1 viene inserito nel terzo elemento per fare in modo che la matematica funzioni correttamente. Per applicare la trasformazione, moltiplicare le due matrici come indicato di seguito.
- P' = P × M
Viene espansa fino a quanto segue.
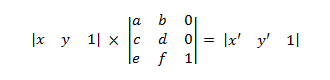
dove
- x' = ax + cy + e y' = bx + dy + f
Per ottenere il punto trasformato, prendere i primi due elementi della matrice P'.
- p = (x', y') = (ax + cy + e, bx + dy + f)
Nota
Una matrice 1 × n è detta vettore di riga. Direct2D e Direct3D usano entrambi vettori di riga per rappresentare i punti nello spazio 2D o 3D. È possibile ottenere un risultato equivalente usando un vettore di colonna (n × 1) e trasponendo la matrice di trasformazione. La maggior parte dei testi grafici utilizza il formato vettore di colonna. Questo argomento presenta il formato del vettore di riga per coerenza con Direct2D e Direct3D.
Le sezioni successive derivano le trasformazioni di base.
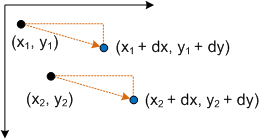
Trasformazione traduzione
La matrice di trasformazione traslazione ha il formato seguente.
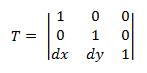
Collegare un punto P in questa equazione restituisce:
- P' = (*x* + *dx*, *y* + *dy*)
che corrisponde al punto (x, y) convertito da dx nell'asse X e dy nell'asse Y.
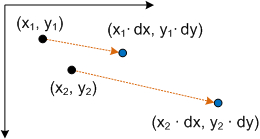
Ridimensionamento della trasformazione
La matrice di trasformazione del ridimensionamento ha il formato seguente.
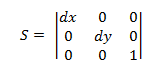
Collegare un punto P a questa equazione restituisce:
- P' = (*x* (*) *dx*, *y* * * *dy*)
che corrisponde al punto (x,y) ridimensionato da dx e dy.
Rotazione intorno all'origine
La matrice per ruotare un punto intorno all'origine ha il formato seguente.
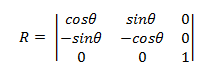
Il punto trasformato è:
- P' = (*x*cosΘ – ysinΘ, *x*sinΘ + *y*cosΘ)
Prova. Per mostrare che P' rappresenta una rotazione, prendere in considerazione il diagramma seguente.
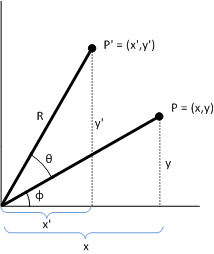
Si consideri quanto segue:
-
P = (x,y)
-
Punto originale da trasformare.
-
Φ
-
Angolo formato dalla linea (0,0) a P.
-
Θ
-
Angolo da cui ruotare (x,y) sull'origine.
-
P' = (x',y')
-
Punto trasformato.
-
R
-
Lunghezza della linea (0,0) a P. Inoltre il raggio del cerchio di rotazione.
Nota
Questo diagramma usa il sistema di coordinate standard usato nella geometria, in cui l'asse y positivo punta su. Direct2D usa il sistema di coordinate di Windows, in cui l'asse y positivo punta verso il basso.
L'angolo tra l'asse x e la linea (0,0) a P' è Γ + Θ. Le identità seguenti contengono:
- x = R cosΓ y = R sinΓ x' = R cos(Γ + Θ) y' = R sin(Γ+ Θ)
Ora risolvere per x' e y' in termini di Θ. Per le formule di addizione trigonometriche:
- x' = R(cosΓcosΘ – sinΓsinΘ) = RcosΓcosΘ – RsinΓsinΘ y' = R(sinΓcosΘ + cosΓsinΘ) = RsinΓcosΘ + RcosΓsinΘ
Sostituendo, si ottiene:
- x' = xcosΘ – ysinΘ y' = xsinΘ + ycosΘ
che corrisponde al punto trasformato P' illustrato in precedenza.
Rotazione intorno a un punto arbitrario
Per ruotare intorno a un punto (x,y) diverso dall'origine, viene usata la matrice seguente.

È possibile derivare questa matrice prendendo il punto (x,y) per essere l'origine.
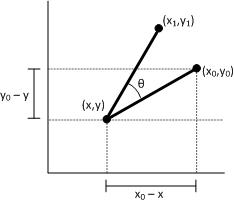
Let (x1, y1) essere il punto che determina la rotazione del punto (x0, y0) intorno al punto (x,y). È possibile derivare x1 come indicato di seguito.
- x1 = (x0 – x)cosΘ – (y0 – y)sinΘ + x x1 = x0cosΘ – y0sinΘ + \[ (1 – cosΘ) + ysinΘ \]
Collegare ora questa equazione alla matrice di trasformazione usando la formula x1 = ax0 + cy0 + e da precedenza. Usare la stessa procedura per derivare y1.
Trasformazione asimmetria
La trasformazione asimmetria è definita da quattro parametri:
- Θ: quantità di inclinazione lungo l'asse x, misurata come angolo dall'asse y.
- Φ: la quantità di inclinazione lungo l'asse y, misurata come angolo dall'asse x.
- (px, py): le coordinate x e y del punto su cui viene eseguita l'asimmetria.
La trasformazione asimmetria usa la matrice seguente.
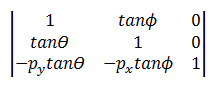
Il punto trasformato è:
- P' = (*x* + *y*tanΘ – *py*tanΘ, *y* + *x*tanΓ) – *py*tanΓ
o equivalentemente:
- P' = (*x* + (*y* – *py*)tanΘ, *y* + (*x* – *px*)tanΓ)
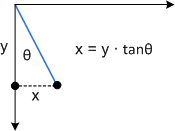
Per vedere come funziona questa trasformazione, considerare singolarmente ogni componente. Il parametro Θ sposta ogni punto nella direzione x in base a un importo uguale a tanΘ. Il diagramma seguente mostra la relazione tra Θ e l'asse x.
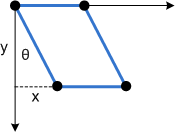
Ecco la stessa deviazione applicata a un rettangolo:
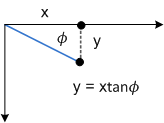
Il parametro Φ ha lo stesso effetto, ma lungo l'asse y:
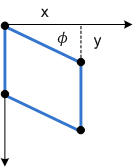
Il diagramma successivo mostra l'asimmetria dell'asse y applicata a un rettangolo.
Infine, i parametri px e py spostano il punto centrale per l'asimmetria lungo gli assi x- e y.
Rappresentazione delle trasformazioni in Direct2D
Tutte le trasformazioni Direct2D sono trasformazioni affine. Direct2D non supporta trasformazioni non affine. Le trasformazioni sono rappresentate dalla struttura D2D1_MATRIX_3X2_F . Questa struttura definisce una matrice di 3 × 2. Poiché la terza colonna di una trasformazione affine è sempre la stessa ([0, 0, 1]), e poiché Direct2D non supporta trasformazioni non affine, non è necessario specificare l'intera matrice 3 × 3. Internamente, Direct2D usa 3 matrici × 3 per calcolare le trasformazioni.
I membri della D2D1_MATRIX_3X2_F sono denominati in base alla posizione dell'indice: il membro _11 è elemento (1,1), il membro _12 è l'elemento (1,2) e così via. Anche se è possibile inizializzare direttamente i membri della struttura, è consigliabile usare la classe D2D1::Matrix3x2F . Questa classe eredita D2D1_MATRIX_3X2_F e fornisce metodi helper per la creazione di una delle trasformazioni di affine di base. La classe definisce anche operator*() per la composizione di due o più trasformazioni, come descritto in Applica trasformazioni in Direct2D.
Prossima