目前狀態感應器 (人類鄰近性)
下一節詳細說明 OEM 選取元件,例如目前狀態感應器以支援上述收件匣裝置體驗的指導方針。 除了特定裝置體驗的特定指引之外,還涵蓋所有感應器的一般需求。 目前狀態感應器是類型為「Human」 的鄰近感應器。 閱讀本節之前,請先檢閱裝置體驗和 目前狀態感知 條款。
本節旨在為想要在系統上安裝目前狀態感應器硬體的 OEM 提供指引。 這些指導方針代表最小可行的感應器設定。 Microsoft 鼓勵安裝硬體,其優於這裡的標準。
Microsoft 不會測量範圍、延遲、距離和電源,但 OEM 和 ODM 應該根據 HLK 需求來驗證功能。 如果系統報告距離,則應該測量其精確度。
所有人類目前狀態感應器的重要設計詳細資料和一般需求
如果鄰近感應器支援人類存在,則必須支援偵測類型:
DEFINE_PROPERTYKEY(DEVPKEY_Sensor_HumanPresenceDetectionType,0xd4247382, 0x969d, 0x4f24, 0xbb, 0x14, 0xfb, 0x96, 0x71, 0x87, 0xb, 0xbf, 81); //[VT_UI4]
目前定義的偵測類型如下:
| 使用方式名稱 | 使用類型 | 使用方式描述 |
|---|---|---|
| 人類目前狀態偵測類型:廠商定義的非生物特徵辨識 | 選取 | 使用廠商定義的但非生物特徵辨識方法,偵測到一或多個人員) 存在 (。 這是用來提供感應器使用與生物特徵辨識無關偵測的正面肯定,如下所述。 若未這麼做,主機就無法假設裝置不會使用生物特徵辨識。 |
| 人類目前狀態偵測類型:廠商定義的生物特徵辨識 | 選取 | 使用廠商定義的人類生物特徵辨識,偵測到一或多個人員) 存在 (。 這是人類目前狀態感應器的攔截功能,其利用以下尚未定義的生物特徵辨識技術。 |
| 人類存在偵測類型:臉部生物特徵辨識 | 選取 | 例如,藉由掃描 (來偵測人類目前狀態,例如,使用Viola-Jones物件偵測) ,透過低解析度的視訊相機) 來偵測人類臉部 (。 不會區分臉部或偵測臉部屬性。 這類偵測類似于現有的數位相機,這些數位相機可以在臉部周圍放置周框方塊。 |
| 人類目前狀態偵測類型:音訊生物特徵辨識 | 選取 | 例如,透過掃描 (來偵測人類存在,例如,麥克風) 人類音效 (預先定義的關鍵字、一般交談、大聲雜訊、雜亂) 。 不會區分語音或使用者,或偵測音訊特性。 |
重要
所有目前狀態感應器都必須正確報告上述的偵測類型。
類別 1 人類目前狀態感應器需求
| Measure | 計量 | 註解 |
|---|---|---|
| 感應器範圍 | .2m – 1.2m 注意:這是最小可行範圍。允許具有較佳範圍的感應器。 | 直接測量 (在上述) 定義時,使用者必須能夠在 1.2m 觸發喚醒。 |
| 感應器延遲 | <.33 秒 | 這與 Category II 感應器延遲相同。 這項需求會定義從人類存在韌體辨識到接收該訊息之作業系統的時間。 已知一旦從感應器收到訊號,作業系統就會有變動的喚醒延遲時間。 |
| 感應器電源 - 使用中 | <80 個內部感應器;對於外部感應器的電力耗用量,取決於匯流排的電源限制;所有量值平均值。 | 此度量會封裝整個感應器子系統,包括傳輸器、接收者,以及根據喚醒和鎖定案例使用的任何 LED。 |
| 感應器電源 - 待命 | <25 個內部感應器;對於外部感應器的電力耗用量,取決於匯流排的電源限制;所有量值平均值。 | 請注意,這是最大尖峰電力耗盡。 |
| 精確度 – 距離報告 | +/- 5 公分 | 以) 為單位 (12、) 中為 75 公 (29.5、 () 120 公分 (47.2。 只有在此感應器支援距離時才需要。 |
類別 2 人類目前狀態感應器需求
| Measure | 計量 | 註解 |
|---|---|---|
| 感應器範圍 | .2m – 1.2m 注意:這是最小可行範圍。允許具有較佳範圍的感應器。 | 直接測量 (在上述) 定義時,使用者必須能夠在 1.2m 觸發喚醒。 |
| 感應器延遲 | <.33 秒 | 此需求會定義從韌體辨識人類存在到接收該訊息的 HID 驅動程式的時間。 已知一旦從感應器收到訊號,作業系統就會有變動的喚醒延遲時間。 |
| 感應器電源 - 使用中 | <65 個內部感應器;對於外部感應器的電力耗用量,取決於匯流排的電源限制;所有量值平均值。 | 此度量會封裝整個感應器子系統,包括傳輸器、接收者,以及根據喚醒和鎖定案例使用的任何 LED。 |
| 感應器電源 - 待命 | <5 個;5 個;對於外部感應器的電力耗用量,取決於匯流排的電源限制;所有量值平均值。 | 當系統處於新式待命狀態時,感應器的電源清空將會測量。 此度量會封裝整個感應器子系統,包括傳輸器、接收者,以及根據喚醒和鎖定案例使用的任何其他硬體。 |
| 精確度 – 距離報告 | +/- 5 公分 | 以) 為單位 (12、) 中為 75 公 (29.5、 () 120 公分 (47.2。 只有在此感應器支援距離時才需要。 |
裝置整合
感應器放置對於提供最佳使用者體驗,以及在裝置之間提供一致的人類目前狀態體驗至關重要。
理想的位置取決於裝置的尺寸,而且在所有情況下,OEM 都應該判斷其裝置的最佳位置。 此外,對於 1 個可轉換膝上型電腦中的 2 之類的多重狀態裝置,建議感應器韌體報告資料欄位 isValid = false 表示人類目前狀態感應器不會產生精確的測量 (,也就是感應器不面向使用者或遭到) 。 感應器的實際最佳位置通常位於與使用者) 面向的顯示器 (相同的平面上。
此外,請確定裝置可以在平板電腦模式與膝上型電腦模式中 (鍵盤位置的不同設定,例如,) 不會封鎖光圈,也不會與感應器的視野相交。
最後,請確定感應器的視野不會與任何雜訊的光線來源交集, (相機閃爍、鍵盤反光燈等) ,因為這些可能會造成額外的雜訊或不良讀數。 請務必考慮裝置在考慮與光線或波的雜訊來源交集的檢視欄位時,裝置可以採取的各種不同組態。
| 板型規格 | 人類目前狀態感應器位置和考慮 |
|---|---|
| Tablet | 將人類目前狀態感應器放在裝置表面附近,而不是中間,並具有適當的防護,以確保精確的讀數。 |
| 敞篷車 | 請針對可轉換樣式系統,使用您最適合的風格。 |
| 翻蓋 | 將人類目前狀態感應器放在蓋子上,在使用者面向的顯示器上方, (建議的) 。 |
| 全一或外部監視器 | 例如,將人類目前狀態感應器放在裝置前方 (,例如) (建議) 。 |
| 桌面 | 如果您要將人類存在感應器放在桌面的底座上,建議您將其放在靠近邊緣的底座頂端。 最好在監視器中包含目前狀態感應器,或提供外部 USB 纜線。 |
外部人類存在感應器支援和仲裁原則
收件匣功能支援整合至監視器的外部人類存在感應器。 下列各節詳細說明套用至外部人類存在感應器的實作、需求和原則。 其他類型的外部感應器,例如獨立感應器,無法完全支援,因為尺寸和使用類型太過不同,無法可靠地支援。 不過,沒有任何明確禁止這類感應器,而且建議廠商有興趣產生這類感應器, sasensors@microsoft.com 會連絡 。
實作
外部人類存在感應器應該與內部感應器相同地公開給 OS,但DEVPKEY_Sensor_ConnectionType感應器屬性應標示為外部,讓 OS 知道外部連線。 OS 會知道感應器是否透過與感應器相關聯的 PLD 資訊整合至外部監視器。 強烈建議您將感應器公開為 HID 裝置,以便使用收件匣 HID 類別驅動程式。 這可讓使用者不需要安裝驅動程式,外部感應器才能運作。
外部感應器與系統之間的實體連線應該是與顯示連線分開的 USB 連線。 這是因為沒有任何標準顯示器連線類型,例如 HDMI 或 DisplayPort,都支援 HID。 顯示器和感應器可能透過 USB-C alt 模式和 USB4 共用一個連線,但並非所有使用者都能存取這類連線器類型,因此不應依賴作為外部感應器的唯一連接器。
規格需求
外部人類存在感應器必須符合與內部人類存在感應器相同的需求,並通過相同的 HLK 和手動測試。
處理具有不同功能的感應器
當有多個具有不同功能的目前狀態感應器時,例如感應器 A 僅支援喚醒方法並保留鎖定,而感應器 B 僅支援調適性暗灰色。 [ 設定 ] 頁面會反映所選感應器的功能。 如果已選取感應器 A,則只會顯示喚醒和鎖定切換。 如果選取感應器 B,則只會顯示調適性暗灰色切換。
預設目前狀態感應器選取邏輯
在和包含 Windows 11 22H2 之前,預設會選擇最後一個連接的感應器。 從 2023 年 5 月更新開始,Windows 11 22H2 和更新版本,選取邏輯如下所示:
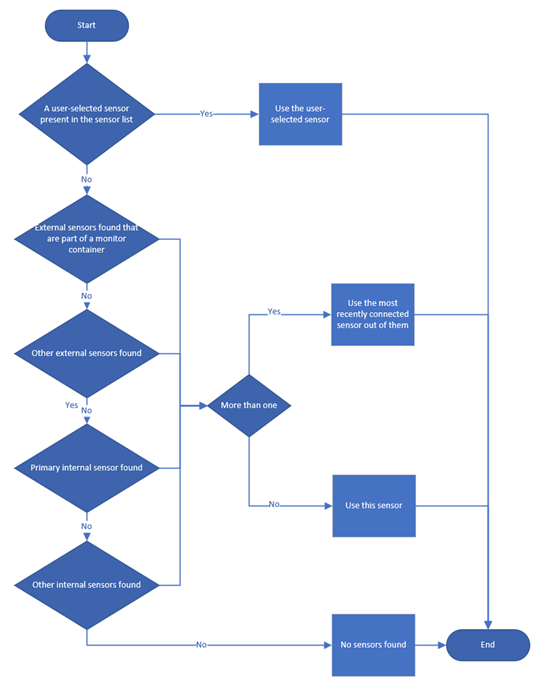
喚醒方法的原則,以及保留鎖定
外部感應器優先于內部感應器,而且連線到系統時,會完全取代內部作為喚醒和鎖定的輸入。 優先順序表示當外部感應器連接時,它會成為系統的預設感應器。 現有的使用者喜好設定,例如逾時或偵測距離,會傳送至外部感應器。
您可以在下面找到不同外部感應器組態的仲裁原則。
| 系統具有整合式感應器 | 系統具有外部感應器 | 仲裁原則 |
|---|---|---|
| 是 | 無 | 如果關閉系統的蓋子;喚醒和鎖定將會停用且無法運作。 |
| 否 | 無 | 功能不存在或已停用。 |
| 是 | Single | 外部連接的感應器將會成為喚醒和鎖定的預設選取感應器。 使用者可以選擇在 Windows 設定使用者介面中設定他們偏好的感應器。 只有在系統有多個可用的感應器時,才會顯示此設定。 在 2023 年 5 月更新版本 22H2 或更新版本中,選取邏輯會遵循預設的目前狀態感應器選取邏輯。 |
| 否 | Single | 外部連接的感應器將會成為喚醒和鎖定的預設選取感應器。 使用者可以選擇在 Windows 設定使用者介面中設定他們偏好的感應器。 只有在系統有多個可用的感應器時,才會顯示此設定。 在 2023 年 5 月更新版本 22H2 或更新版本中,選取邏輯會遵循預設的目前狀態感應器選取邏輯。 |
| 是 | 多個 | 相同的使用者選項會顯示在使用者介面中。 上次連線到系統的感應器將會是預設感應器,直到使用者選擇另一個選項為止。 在 2023 年 5 月更新版本 22H2 或更新版本中,選取邏輯會遵循預設的目前狀態感應器選取邏輯。 |
| 否 | 多個 | 相同的使用者選項會顯示在使用者介面中。 上次連線到系統的感應器將會是預設感應器,直到使用者選擇另一個選項為止。 在 2023 年 5 月更新版本 22H2 或更新版本中,選取邏輯會遵循預設的目前狀態感應器選取邏輯。 |
提示
判斷監視器上的感應器是否可供使用時,不會考慮監視方向,假設感應器在這些情況下仍可正常運作。
虛擬人類存在感應器
人類存在感應器必須由實體裝置支援。 換句話說,假的軟體裝置不應該公開為 Proxy,以控制喚醒、鎖定或調適型暗灰色。 這項功能僅適用于實體案例。 這項需求的意圖是,目前狀態感應器必須偵測並參考實體環境,以判斷使用者存在訊號。 如果虛擬 HID 感應器匯總來自其他感應器的資料,例如麥克風或其他使用者輸入,而且正在卸載的晶片中執行,例如 NPU 或 MCU,而 OS 上的應用程式無法存取影像或音訊中繼資料,則可能會實作虛擬 HID 感應器。 在相機的情況下,虛擬存在感應器不應在 OS 中使用或處理影像中繼資料。 實作虛擬感應器的 OEM 和 IHV 在 OS 上取用映射或中繼資料時,會承擔這類實作隱私權的所有法律責任。
此白皮書中目前感應器的電源需求適用于實體感應器。 對於執行其他子系統部分的虛擬化感應器,電源需求會繼承自其執行中的子系統。 例如,在新式待命系統上執行的虛擬目前狀態感應器,並在卸載的音訊子系統中執行,應遵循新式待命平臺的音訊子系統電源管理中所列的需求
與相機隱私權快門和終止開關互動
除非將影像中繼資料傳輸至 OS,否則隱私權快門不會干擾人類存在感應器。 如果相同的實體感應器與Windows Hello (IR 相機) 或一般 RGB 相機搭配使用,則建議人類存在感應器透過 IS (P 的個別實體路徑公開,例如透過離散 NPU) ,其中推斷和沒有影像中繼資料 (包括臉部簽章) 傳送至 OS。 由於相機終止開關應該在 ISP 韌體中運作,因此實際分隔的路徑可確保終止開關不會干擾人類存在功能。 如果共用感應器未使用個別的實體路徑,則相機 HLK 指引表示隱私權快門同時在 RGB 和 IR 感應器上運作,這會干擾人為存在功能,導致使用者體驗不佳,因為 Windows 不會通知使用者人類存在遭到封鎖。 目前不建議在人類存在與 ISP 之間有共用路徑。 不過,如有必要,ISP 會停止 HPD 偵測 (以節省電池) ,並回報 HPD 感應器無法使用。
強烈建議使用 AVStream 或 DMFT 驅動程式) 時,透過CT_PRIVACY_CONTROL (的 UVC 裝置) CT_PRIVACY_CONTROL (或KSPROPERTY_CAMERACONTROL_PRIVACY (,向 OS 回報其狀態。 如需詳細資訊,請參閱 相機隱私權快顯通知。
如需相機隱私權快門、終止開關和 LED 功能的詳細資訊,請參閱 相機隱私權控制。
與相機隱私權 LED 互動
Microsoft 預期相機隱私權 LED 可以保持關閉,但若未將影像中繼資料傳輸至 OS,則應該保持關閉。 人類存在感應器無法實際將臉部或影像資料傳送至 OS 是必要的。 這可以透過各種機制來完成,例如,但不限於專用匯流排,或實際上與相機 ISP 或感應器內的融合線分隔路徑。 如需相機隱私權 LED 功能的詳細資訊,請參閱 相機隱私權控制項 一節。
實作指南
本節的讀者 (想要開發目前感應器驅動程式) 應該熟悉 感應器驅動程式設計指南。
在硬體中,人類目前狀態感應器會實作為 SensorType_Proximity , DEVPKEY_Sensor_ProximityType 並將 設定為 ProximityType_HumanProximity = 1 。
如果感應器利用生物特徵辨識技術,則可以在 SensorCategory_Biometric中。
裝置匯流排連線能力
HLK (中的測試外部沒有硬性需求,請參閱下列) 裝置匯流排連線能力。 不過,建議系統產生器盡可能利用Windows 11可用的收件匣驅動程式。 例如,I2C 有收件匣 HID 驅動程式,以及適用于 HID 型裝置的收件匣感應器驅動程式。 這提供 Microsoft 將在Windows 11中維護收件匣驅動程式的優點。
電源管理
本節包含人類存在感應器電源管理的基本概觀。 如需詳細資訊,請參閱 感應器電源管理。
提示
目前狀態感應器的設計目的是在現代待命系統上運作。 已于 2023 年 5 月更新中新增非新式待命系統喚醒方法的其他支援,以Windows 11版本 22H2 和更新版本。
HIDUSB 實作的其他需求
透過 USB 裝置的 HID 選擇性暫停一文提供 OEM 或 IHV INF 如何參考收件匣輸入的範例。INF 可啟用不同的選擇性暫停功能。 OEM 和 IHV 在其 INF 中可能會執行類似動作,但參考上述章節以啟用喚醒觸控。
為了簡化此 INF,OEM 和 IHV 也可能會考慮改為建立擴充功能 INF。 請參閱 使用擴充功能 INF 檔案 檔。
如果裝置有多個 HID 集合,包括人類存在感應器集合、非人類存在集合,感應器韌體應該只支援從人類鄰近集合喚醒。 如果非人類存在感應器集合可能也會發出喚醒訊號,裝置仍會回到 D0 以清空電源。
通訊協定實作 (高階架構)
本節需要必要的驅動程式實作詳細資料,才能向 OS 回報人類存在感應器。 技術上,這是透過實作生物特徵辨識感應器類別中鄰近類型感應器的人類鄰近偵測類型來完成。
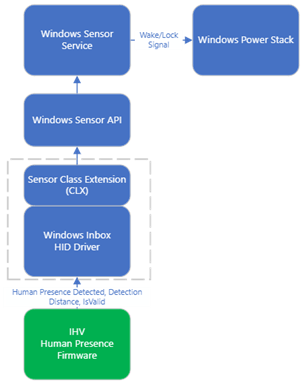
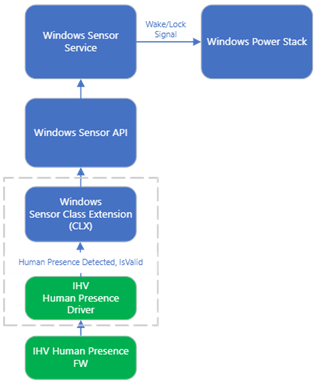
下圖代表當功能正常運作時,來自感應器的資料如何向上流動堆疊。 外部監視器將使用標示為「HID」的圖表。
| 驅動程式類型/感應器功能 | Distance-Capable HW (+/- 5cm) | Distance-Agnostic HW |
|---|---|---|
| HID:人類介面裝置 | 支援 HID 的距離資料流程 (建議) | HID 型距離無關資料流程 |
| CLX:Windows 感應器類別延伸模組 | CLX 型可支援距離的資料流程 | CLX 型與距離無關的資料流程 |
支援 HID 的距離資料流程 (建議)
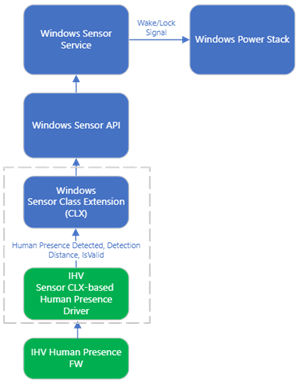
CLX 型可支援距離的資料流程
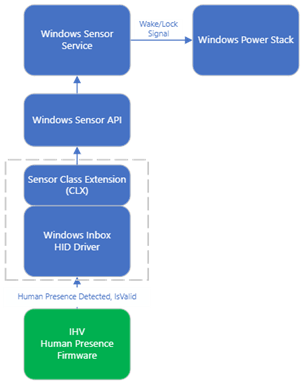
HID 型距離無關資料流程
CLX 型與距離無關的資料流程
高階資料流程
- 使用者透過設定 UI 修改喚醒或鎖定設定,並且會與 Windows 感應器服務通訊。
- Windows 感應器服務會在正常作業或新式待命期間啟動人類存在感應器,以監視喚醒和鎖定。
- 人類存在感應器會引發新的樣本,其中包含人類存在、偵測距離和 有效。
- 如果系統處於新式待命狀態,而新的人類存在範例會在設定的偵測範圍內報告人類,Windows 感應器服務會將喚醒訊號傳送至 Windows 電源堆疊。 相反地,如果系統處於正常作業中,且人類未回報或不在設定的偵測範圍之外,Windows 感應器服務會將逾時訊號傳送至 Windows 電源堆疊。
人類存在訊號
信號:
- 使用者顯示訊號 – 當感應器報告資料樣本,並將人類目前資料欄位設為 true 時發生。 如果系統支援注意,則注意會設定為處於此狀態的參與/true。
- 使用者未參與訊 號 – 在感應器報告資料樣本時,感應器報告資料樣本時,會將人類目前資料欄位設定為 true,然後將注意力設定為未產生或誤判時發生。
- 使用者沒有訊號 – 當感應器報告資料樣本時,會將人類目前資料欄位設定為 false 時發生。
- 使用者未知訊 號 – 在人類存在不明時發出訊號。 如果感應器遭到假性移除,或感應器尚未報告有效的樣本,就會發生這種情況。
必要的 HID 描述項和最上層集合
如果實作,使用下列其中一個 HID 架構,下一節會說明用來公開目前狀態資訊的資料欄位。
如需透過 HID 公開裝置的其他資訊,請參閱 感應器 HID 使用量。
人類存在 – (喚醒和鎖定)
| 使用量識別碼 | 註解 |
|---|---|
| 0x04B1 HID_USAGE_SENSOR_DATA_BIOMETRIC_HUMAN_PRESENCE | 用來公開指出存在狀態的布林值。 將此值設定為 「1」,表示人類存在。 將此值設定為 「0」,表示沒有人類存在。 |
| 0x04B2 HID_USAGE_SENSOR_DATA_BIOMETRIC_HUMAN_PROXIMITY_RANGE | 用來公開輸入報表預設單位中的距離值以公尺為單位,但本檔中的範例報表描述元會顯示裝置如何報告公釐。 這會在未來的 Windows Update 中成為選擇性欄位。 |
注意
公釐報表必須精確到 +/- 5000mm 內。 報告的範圍可以是連續或離散遞增小於 5000mm (,也就是 2000mm、7000mm,..) 。這會在未來的 Windows Update 中成為選擇性欄位。
驗證指南 - 最低需求和測試:Windows 硬體認證計畫 (WHCP)
在 Windows 硬體相容性計畫規格和原則中,硬體實驗室套件 (HLK) 測試中概述認證硬體與相容性的最低需求。